[X] Binary Heaps
-
Binary Heaps - und eine effiziente Implementierung
Heaps sind eine Datenstruktur, die vor allem bei der Implementierung von Priority-Queues verwendet wird.
In erster Linie möchte ich binary Heaps vorstellen und zeigen, wie man sie in C++ effizient implementiert. Die Implementierung wird dabei nicht unbedingt mit der, wie sie in klassischen Algorithmenbüchern beschrieben ist, übereinstimmen. Ein Blick dorthinein lohnt sich auf jeden Fall trotzdem noch um zum Einen eine andere Darstellung zu sehen, und vielleicht auch die klassische Implementierung kennen zu lernen.
Nebenbei wird Heap-Sort, ein Sortierverfahren, das stets mit höchstens 2N*logN Element-Vergleichen sortiert, abfallen. Außerdem möchte ich auch noch kurz auf die Unterstützung in C++ durch die STL eingehen.1 Heaps - Die Theorie
Zunächst möchte ich einmal annehmen, daß alle Schlüssel ganze Zahlen sind.
Letztlich benötige ich aber nur die Möglichkeit zu vergleichen.Ein einfacher Heap bietet nach außen nur 3 Operationen an:
- getMin, gibt das kleinste Elemente im Heap zurück.
- Insert, fügt einen neuen Knoten in den Heap ein.
- deleteMin, löscht den Knoten mit dem kleinsten Schlüssel aus dem Heap.
getMin hat eine Laufzeit von O(1), alle anderen Operationen haben eine worst-case Laufzeit von O(log n). Insert hat im Schnitt sogar konstante Laufzeit.
Ein binary Heap ist ein Binärbaum, der zusätzlich folgende Eigenschaften erfüllt:
H1) Er ist soweit wie möglich balanciert, nur die letzte Schicht darf nicht voll besetzt sein. Die letzte Schicht muß linksbündig ausgefüllt sein.
H2) Für jeden Knoten gilt: sein Schlüssel ist kleiner als die Schlüssel seiner Kinder.
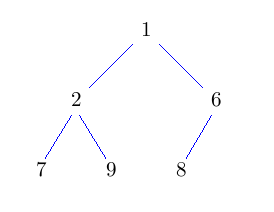
Eigenschaft H1) wird uns später eine sehr effiziente Implementierung der Baumstruktur erlauben, Eigenschaft H2) garantiert, daß die Operationen wie deleteMin effizient ausgeführt werden können.
Die Reihenfolge der Kinder eines Knotens ist dagegen beliebig und nicht wie bei einem Suchbaum geordnet. Das linke Kind muß nicht das kleinere sein.Kommen wir nun zu den 3 Operationen.
1.1 getMin
Das ist einfach. Aufgrund der Eigenschaft H2) muß die Wurzel der Knoten mit dem keinsten Schlüssel sein. Wir können also einfach die Wurzel zurückgeben. Das geht in konstanter Zeit.
1.2 Insert
Insert
Das ist schon schwieriger. Wir gehen davon aus, daß wir zu Beginn einen korrekten Heap haben.
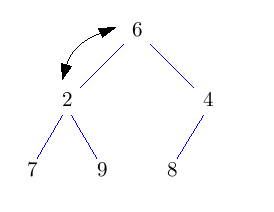
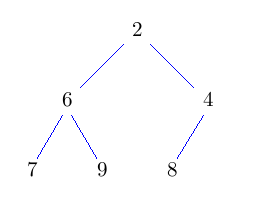
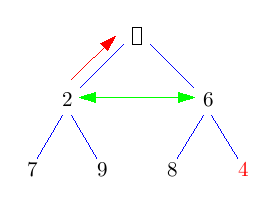
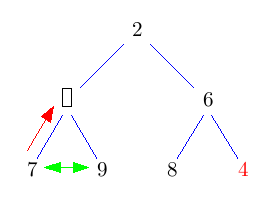
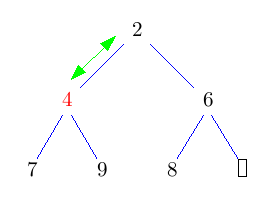
Beim Einfügen wird der neue Knoten einfach dort eingehängt, wo der nächste Knoten hin muß. In der untersten Ebene soweit links, wie möglich. Damit ist Eigenschaft H1) erfüllt. Leider ist Eigenschaft H2) noch nicht erfüllt.Um den Heap zu "reparieren" Vertauschen wir den neu eingefügten Knoten so lange mit seinem Vater, bis die Eigenschaft erfüllt ist.
Im Pseudo-Code sieht das so aus:solange Schlüssel kleiner als der des Vaterknotens: Vertausche Knoten mit seinem VaterDieses nach oben durchsickern des Knotens heißt auch "sift-up".
Die grünen <-> Pfeile symbolisieren in den folgenden Bildern einen Vergleich, rote Pfeile/Doppelpfeile symbolisieren ein move/swap.
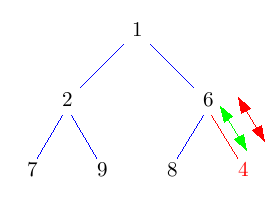
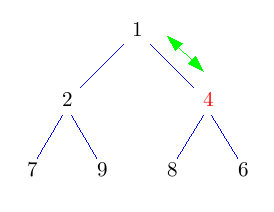
Das Auffinden der richtigen Stelle geht in konstanter Zeit (wie werden wir in der Implementierung sehen). Der gesamte Baum hat Höhe log N, daher kann auch sift-up höchstens log N Schritte brauchen. Im Schnitt sind sogar nur O(1) sift-up Schritte pro Einfügung nötig.
1.3 Delete Min
Im Prinzip müssen wir an dieser Stelle nur die Wurzel des Baumes löschen. Allerdings müssen wir die Datenstruktur anschließend noch wieder reparieren.
An dieser Operation scheiden sich ein bißchen die Geister. Die meisten Lehrbücher, zum Beispiel Sedgewick schlagen folgendes Vorgehen vor:
Entferne die Wurzel und setze an dessen Stelle das Knoten, das am weitesten unten rechts im Baum steht. Dadurch erhalten wir wieder einen Baum, der zumindest Eigenschaft H1) erfüllt. Nun lassen wir die neue Wurzel nach unten durchsickern, bis auch Eigenschaft H2) erfüllt ist. Solange sein Schlüssel nicht kleiner ist, als der seiner beiden Kinder, vertausche ihn mit dem Kind mit dem kleineren Schlüssel.
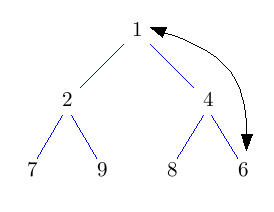
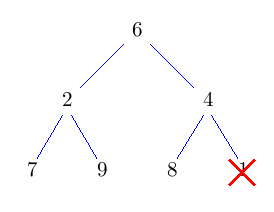
Dieses nach unten Durchsickern lassen des Knotens heißt auch sift-down. Das Vertauschen des Wurzelknotens mit dem Knoten am weitesten unten rechts, sowie das löschen des Wurzelknotens geht wieder in konstanter Zeit. Der neue Wurzelknoten kann höchstens bis nach ganz unten in den Baum durchsickern. Also hat deleteMin eine Laufzeit von O(log n).
Etwas unschön ist dabei der Vergleich mit beiden Kindern und der beiden Kinder nochmals untereinander. Man kann das zwar mit 2 Vergleichen hinbekommen, indem zunächst das kleinere Kind ermittelt und dann dieses mit dem Knoten, der durchsickern soll vergleicht.
1.3 Delete Min - Alternative
Nun möchte ich noch eine andere Implementierung von deleteMin vorstellen, die diesen Makel beseitigt und etwa doppelt so schnell sein kann. Dieses "doppelt so schnell" ist allerdings mit Vorsicht zu genießen. Um das mit letzter Sicherheit sagen zu können müßte man beide Varianten mal hocheffizient implementieren und messen. Ich habe schon Resultate von "doppel so schnell wie die naive Implementierung" bis "kein Unterschied feststellbar" gesehen.
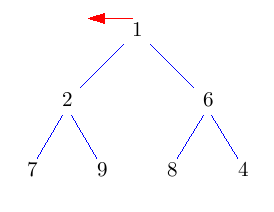
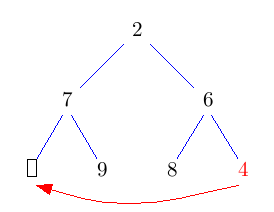
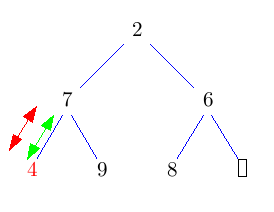
Die Idee ist: Die Wurzel einfach rauszulöschen und das entstehende Loch nach unten durchsickern zu lassen, indem man immer das kleinere Kind nach oben zieht. Das kostet jeweils nur einen Vergleich. Dadurch landet das Loch nach log(n) Schritten in der untersten Ebene. Nun können wir es mit dem Blatt ganz rechts unten im Baum vertauschen und das Loch endlich wegfallen lassen. Nun müssen wir nur noch den getauschten Knoten wieder nach oben durchsickern lassen. Das geht aber im Schnitt sogar in konstanter Zeit.
Im folgenden Bild bedeuten grüne Doppelpfeile einen Vergleich, rote Pfeile move und rote Doppelpfeile swap.
2 Anwendungen
Nachdem nun geklärt ist, was Heaps eigentlich sind und wie sie funktionieren, möchte ich, bevor wir zur Implementierung kommen noch kurz zwei kleine Anwendungen von Heaps besprechen.
2.1 Priority Queues
Zum Einen werden Heaps verwendet um priority-qeues zu implementieren. Man baut sich einfach einen Heap mit allen in der Queue befindlichen Elementen auf. Wird das nächste Elemente gefordert, führt man einfach deleteMin aus und gibt das kleinste Element zurück. Das Einfügen in die Queue ist ein simples Einfügen in den Heap.
template <typename T> class PriorityQueue { public: T deleteMin() { T item = heap_.getMin(); heap_.deleteMin(); return item; } void insert(T const& item) { heap_.insert(item); } private: Heap<T> heap_; }Ausgefeiltere Implementieren lassen vielleicht auch noch die Angabe eines Vergleichsoperators zu.
Möchte man allerdings auch Dinge, wie das Löschen von Elementen oder das Verändern von Prioritäten (also Schlüsseln im Heap) unterstützen wird die Sache etwas kniffliger und läßt sich auch nicht mehr ganz so effizient implementieren. Die Performance-Garantien im O-Kalkül können aber eingehalten werden. Mit noch etwas Mehraufwand läßt sich sogar die join-Operation, also die Vereinigung zweier Warteschlangen zu einer großen effizient implementieren.
2.2 Heapsort
Wie kann man nun mit Heaps sortieren? Auch das ist recht naheliegend.
Man fügt alle Elemente, die man sortieren möchte in den Heap ein und holt sie nacheinander mit deleteMin wieder heraus.Das sind n Insert-Operationen und n delete-Min-Operationen. Beide Einzeloperationen haben jeweils eine Laufzeit von O(log n). Heapsort hat also eine Laufzeit von O(n log n) und gehört damit zu den effizienten Sortierverfahren. Es benötigt immer, auch im worst-case maximal 2n log n Vergleiche.
3 Implementierung
So, nun kommen wir zum spannenden Teil. Wie implementiert man sowas effizient? Den Baum wirklich als Baum mit Parent- und Childpointern abzuspeichern wäre ziemlich ineffizient. Durch den strikten Aufbau des Baumes kann man ihn allerdings sehr einfach in einem Array abspeichern.
Dazu schauen wir uns noch einmal den Baum an und nummerieren die Knoten durch, in dem wir sie Zeile für Zeile jeweils von links nach rechts durchlaufen.
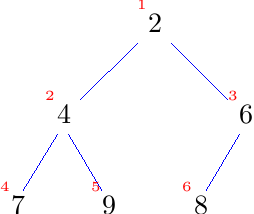
Nun legen wir den Baum in einem Array ab, indem wir jeden Knoten an den Index legen, der seiner Nummerierung entspricht.
Das sieht so aus:[ ?, 2, 4, 6, 7, 9, 8, ? ]Die Frage ist:
Warum beginnnen wir nicht, wie jeder gute Programmierer bei 0 zu zählen?
Und die Daten liegen nun scheinbar recht willkürlich in dem Array. Wo ist unser schöner Baum geblieben?Man kann sich aber leicht klar machen, daß man anhand der Indizes sehr leicht immer noch im Baum navigieren kann.
Der Index des Vaterknotens von Knoten i ist einfach i/2.
Die Indizes der Kinderknoten von Knoten i sind 2*i und 2*i+1.
Da der Heap in der letzten Reihe von links nach rechts aufgefüllt wird, kann man durch Vergleich der errechneten Indizes mit der aktuellen Heap-Größe herausfinden, ob das Kind existiert.Vielleicht ist das auch ein guter Grund seine Arrays ab 1 zu nummerieren.
")
Alles was wir brauchen, um im Heap zu navigieren sind also Multiplikationen mit 2, Addition und Division durch 2, sowie einige Vergleiche. Das sind sehr einfache und schnelle Operationen, wir können also auf eine hocheffiziente Implementierung hoffen.
Mit der Platzverschwendung des ersten Elements (Index 0) können wir entweder leben, oder aber vor jedem Array-Zugriff vom errechneten Index noch 1 abziehen. Da wir aber so schnell wie möglich sein wollen verschwenden wir lieber etwas Platz. zudem macht es die Implementierung etwas einfacher.Nachdem die Idee zur Implementation nun klar ist, können wir loslegen.
3.1 Der Rahmen
template<typename T, size_t MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> > class Heap { public: Heap(); T getMin() const; void insert(T const& element); void deleteMin(); private: size_t getFather(size_t i) const { return i/2; } size_t getLeftChild(size_t i) const { return 2*i; } size_t getRightChild(size_t i) const { return 2*i + 1; } bool isRoot(size_t i) const { return i==1; } bool isLastElement(size_t i) const { return i==size_; } int getRoot() const { return 1; } T elements_[MAX_SIZE+1]; size_t size_; };Die father/child-Funktionen kapseln die Adressberechnungen, und machen so das Programm lesbarer.
Das ist zunächst mal alles was wir brauchen. Im Konstruktor initialisieren wir den Heap leer. Dazu müssen wir nur die Größe auf 0 setzen.3.2 Konstruktor
template<typename T, int MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> > Heap::Heap() : size_(0) { }3.3 GetMin
Auch getMin ist einfach:template<typename T, int MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> > T Heap::getMin() const { assert(size_ != 0); // je nach Geschmack könnte man auch if(...) throw out_of_range schreiben. return elements_[1]; }3.3 insert
So, nun kommen die härteren Brocken. Zunächst insert:
Zur Erinnerung, wir fügen das neue Element in der untersten Zeile des Baums ganz links ein und lassen es dann nach oben durchsickern.template<typename T, int MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> > void Heap::insert(T const& element) { size_t current = ++size_; size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { // Wir sind noch nicht an der Wurzel und unser Element ist "kleiner" als der Vater // also sickern wir nach oben elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Eine mögliche Optimierung wäre die Platzierung eines Sentinels mit minimalem Key an Stelle 0 im Index. Dann könnte auf die Abfrage !isRoot verzichtet werden.
3.4 deleteMin
Jetzt fehlt nur noch die deleteMin-Methode. Ich werde eine Implementierung der zweiten Variante vorstellen. Zur Erinnerung: Wir löschen das kleinste Element und füllen die Lücke, indem wir immer das kleinere Kind nach oben ziehen. Anschließend tauschen wir die Lücke mit dem letzten Element des Heaps und lassen es nach oben sickern.
template<typename T, int MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> > void Heap::deleteMin() { size_t current = getRoot(); size_t child = getLeftChild(current); if(child <= size_) { do { // wenn child nicht das letzte Element (der Knoten also 2 Kindet hat) // wechsle zum rechten Kind, wenn es kleiner ist child += (!isLastElement(child) && compare(elements_[child+1], elements_[child])); elements_[current] = elements_[child]; current = child; child = getLeftChild(current); } while(child <= size_); } // die Lücke ist nun unten angekommen // tausche mit letztem Blatt und vermindere Größe um 1. T element = elements_[size_--]; // jetzt noch das Blatt wieder hochsickern lassen. size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Damit ist auch die letzte Funktion geschafft.
3.5 Details zur Implementierung
Das war's zunächst mal von der Implementierungsseite. Durch die Kapselung der father/child/isRoot etc.-Funktionen könnte man nun auch leicht die Platzverschwendung bei Element 0 loswerden. father(i) = i/2 bleibt, leftchild(i) = (i+1)*2-1 usw. allerdings muß man auch in den Funktionen einige Vergleiche mit size_ ändern. Wieviel langsamer es danach ist, müßte man mal nachmessen. Dazu habe ich aber gerade keine Lust. Außerdem stört mich der kleine Platzoverhead nicht. Wir hatten ja sogar festgestellt, daß man ihn zum Beispiel als Sentinel nutzen könnte, indem man zum Beispiel bei einem Heap<unsigned int> eine 0 reinschreibt. Auch hier wäre eine Messung interessant, ob es die Performance steigert. Ein heißer Kandidat für solche Messungen ist übrigens heap_sort, oder auch die Verwendung in einer Priority-Queue.
4 Heaps in der STL
Auch die STL bietet eine Implementierung der Datenstruktur Heap, und auch heap-sort ist vorhanden. Die Heaps aus der STL sind Max-Heaps, das heißt an der Wurzel steht das größte Element, nicht wie in unserer Implementierung das Kleinste. Das ist natürlich nur eine Frage des Sortierkriteriums.
Im Header <algorithm> sind folgende Funktionen:
void make_heap(RandomAccessIterator beg,RandomAccessIterator end);Baut in der Range einen Heap, indem es die Elemente so umsortiert, daß an der der Stelle beg das größte Element steht.
void push_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß die Range [beg, end-1) bereits ein heap ist und fügt diesem das Element an der Stelle end hinzu.
void pop_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß [big, end) ein Heap ist und nimmt das größte Element aus dem Heap heraus und legt es an der nun frei werdenden Stelle end ab.
sort_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß [beg, end) ein heap ist und wandelt diesen in eine sortierte Folge um. Danach ist die Sequenz kein Heap mehr!
Jede dieser Funktionen gibt es auch noch in einer weiteren Variante mit einem zusätzlichen Parameter um das Sortierkriterium festzulegen.
// Beispiel fehlt noch
5 Ausblick
Ich habe in diesem Artikel gezeigt, was ein binary Heap ist und wie man ihn implementiert. Es sind aber auch noch einige Dinge offen.
Der Heap, wie ich ihn vorgestellt habe ist statisch. Wer ihn dynamisch wachseln lassen möchte, könnte als zugrundeliegende Datenstruktur einen std::vector benutzen. Interessant wäre es auch, das Array über einen Pointer zu adressieren und ähnlich wie die STL-Variante den Heap inplace in einem gegebenen Speicherbereich zu erzeugen. Diese Funktionalität könnte man über einen eigenen Konstruktor bereitstellen.
Interessant für eine flexiblere Priority Queue ist die Möglichkeit Elemente auch wieder zu löschen oder ihren Key zu verändern (vor allem verkleinern). Da es keine Möglichkeit gibt in einem Heap effizient zu suchen, müßte der Index des Knotens, der gelöscht werden soll bekannt sein. Dann könnte man ihn einfach mit dem letzten Blatt vertauschen, sodaß er gelöscht werden kann. Anschließend muß man reingetauschten Knoten noch nach unten durchsickern lassen. Möglicherweise wäre es dann interessant, doch eine Funktion siftdown(i) zu implementieren, die das übernimmt. Der Code ist im Prinzip vorhanden. Es ist klar, daß diese Operation in O(log n) Zeit läuft. Damit läßt sich auch das ändern eines Keys über remove/insert implementieren. Die Laufzeit ist ebenfalls O(log n) Zeit.
Es gibt noch weitere Heaps, man könnte zum Beispiel einen 4-ary Heap oder gar noch Bäume mit noch höherem Grad bauen. Da viele aktuelle Prozessorarchitekturen allerdings sehr wenig Register haben wird das nicht viel Effizienter als ein binary Heap. In Zukunft könnte das aber anders aussehen. unterschiedliche Heap-Varianten bieten unterschiedliche Laufzeitgarantien. Für spezielle Anwendungen und wenn es auf Performance wirklich ankommt, lohnt sich also ein Blick auf http://de.wikipedia.org/wiki/Heap_(Datenstruktur).
Vielleicht wird es auch noch einen zweiten Teil dieses Artikels geben, in dem ich Pairing-Heaps und Fibonacci-Heaps vorstelle.
6 Quellen
- http://de.wikipedia.org/wiki/Heap_(Datenstruktur)
- Algorithmen in C++, Robert Sedgewick, Addison-Wesley (1999)
- Vorlesungsfolien "Algorithm Engineering", Prof. Sanders, Uni KA(SS06)
- The C++ Standard Library, Nicolai M. Josuttis, Addison-Wesley (1999)
-
So, ich hab mal ein bißchen was zusammengeschrieben. Auf Fibonacci-Heaps habe ich zunächst verzichtet. Der Artikel ist auch so lang genug denke ich. Ich kann mir aber gut Vorstellen noch irgendwann einen zweiten Teil zu schreiben, in dem ich Pairing Heaps und Fibonacci Heaps vorstelle.
Der Code ist noch völlig ungetestet.
Ich freue mich über jegliches Feedback, egal ob technisch oder stilistisch.
-
Hallo Jester,
ich bin jetzt mal kurz drüber geflogen und habe soweit keine inhaltlichen Fehler gefunden.
Das Erklären mit Bildern finde ich klasse. Die Bilder sind gut gelungen und leich nachzuvollziehen.
Den Code habe ich noch nicht genauer unter die Lupe genommen da fehlt mir in der Mittagspause die Zeit.
Alles in allem würde ich sagen verständlich und gut nachvollziehbar.
-
Hey,
hab mir den Artikel jetzt auch zu Gemüte geführt und finde ihn sehr gut, v.a. die anschaulichen Erkälärungen sind echt super

Das einzige was mir fehlt, ist die Info dass keine Node weiter als
von der Wurzel weg ist. Falls ich's überlesen habe: Sorry
Grüße
GPC
-
Jester schrieb:
Vielleicht ist das auch ein guter Grund seine Arrays ab 1 zu nummerieren.
da bin ich vielleicht ein wenig am zweifeln.
machen wir mal ein kleines gedankenexperiment und lassen unsere array bei 0 beginnen. und wir lassen weiterhin vater(i)=i/2 definiert.
das hat den lustigen effekt, daß
vater(7)==3 und vater(6)==3 //wie bei dir
vater(5)==2 und vater(4)==2 //wie bei dir
vater(3)==1 und vater(2)==1 //wie bei dir
vater(1)==0 //neu
vater(0)==0 //neu //der papa von der root ist die rootnun terminiert sift-up in dem unwahrscheinlichen fall, daß man doch bist zur root hochblubbert, ganz von allein. die root ist durch personalunion sicher nicht kleiner als ihr papa.
template<class C> void insert(const T &t,const C &comparator) { int pos=size++; //Ganz hinten einfügen data[pos]=t; while(comparator.lessThan(data[pos],data[pos/2])) {//Solange ich kleiner als mein Papa bin, darf ich //ihn verdrängen. Spätestens beim ersten Element //hört die Schleife auf, weil es sein eigener Papa //ist. swap(data[pos/2],data[pos]); pos/=2; } }außerdem hab ich swap benutzt, weil sich das mit furchtbar vielen c++-klassen verträgt. ich hoffe, bei der topologie mit 0 hat man auch für PODs (kopieren statt swappen) den gleichen vorteil.
-
Hm, stimmt auch Kinder berechnen geht noch relativ vernünftig. Die große Frage ist: Kann man das immer noch so gut verstehen?
Daß man es umschreiben kann ist klar. Wie man das machen muß habe ich auch im Ansatz beschrieben. Vielleicht mache ich das einfach noch ein bißchen ausführlicher. Daß root gleichzeitig sentinel ist, ist natürlich nett.
Das mit dem swap ist natürlich sone Sache. Kommt nun drauf an, was Du da einlagerst. Für kleine Elemente ist die Variante eigentlich garnix zu überschreiben vielleicht etwas schneller. Wenn Du std::vectors oder irgendwas anderes was teuer zu kopieren ist reinschreibst, dann liegt swap ganz klar vorne.
Vielen Dank für die Anregungen!
-
Kleinigkeiten, die mir beim ersten Lesen aufgefallen sind:
1. Die Überschrift von 3.3 sollte wohl getMin und nicht GetMin heißen
2. Ist die Benutzung von size_t bei dir sehr inkonsistent3.1 Der Rahmen
[...]template<typename T, size_t MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> >[...]
3.2 Konstruktor
[...]template<typename T, int MAX_SIZE, bool (*compare)(T const&, T const&) = std::less<T> >[...]
usw.
3. Wenn du std::less schreibst, solltest du auch std::size_t schreiben
4. Mach den Wikipedia-Link bitte auch in den Quellen klickable und () sollte in den Links erlaubt sein (benutz einfach den url-tag)
5. Das ist sicher diskussionswürdig: Ich würde als Member nicht unbedingt ein Array benutzen, bei dem der Benutzer die Größe festlegt. Das könnte leicht den Stack killen und so ein kritisches Verhalten würde ich nicht erwarten von einer Klasse. Normalerweise würde ich daher wohl eine Policy schreiben, für die Speicherung des Arrays. Aber im Grunde ist es egal.so das war es. Der Artikel ist wirklich sehr nett und die Bilder machen das Thema wirklich gut anschaulich.
-
1-4: geht auf jeden Fall klar.
5: Ich habe zumindest darauf hingewiesen, daß man leicht gegen std::vector austauschen kann. Eine Policy werde ich nicht einbauen, da sie imho den Code zu sehr verschleiert. Es geht schließlich in erster Linie um Heaps.
Nebenbei finde ich, daß Klassen mit zu vielen template-Parametern vielleicht hochflexibel sind, aber oft auch abschreckend wirken.Ich überlege mir mal, ob ich's vielleicht noch komplett auf std::vector umstelle.
Andere Container kommen aufgrund der nötigen Zugriffsmöglichkeiten eh nicht wirklich in Frage.Danke für's Korrekturlesen!
-
Jester schrieb:
1-4: geht auf jeden Fall klar.
5: Ich habe zumindest darauf hingewiesen, daß man leicht gegen std::vector austauschen kann. Eine Policy werde ich nicht einbauen, da sie imho den Code zu sehr verschleiert. Es geht schließlich in erster Linie um Heaps.
Nebenbei finde ich, daß Klassen mit zu vielen template-Parametern vielleicht hochflexibel sind, aber oft auch abschreckend wirken.Ich überlege mir mal, ob ich's vielleicht noch komplett auf std::vector umstelle.
Andere Container kommen aufgrund der nötigen Zugriffsmöglichkeiten eh nicht wirklich in Frage.Danke für's Korrekturlesen!
5. ist sicher nicht so eindeutig lösbar. Eine Policy würde den Artikel wirklich zu komplex machen. Ich denke es reicht eigentlich auch so.
-
@Jester Kann der Artikel bei der nächsten Runde raus? Falls ja, auf [T] setzen. Danke.
-
Ich sollte ihn vielleicht vorher noch fertig schreiben.
Da das aber eine gute Ablenkung von meiner Diplomarbeit ist werde ich das wohl demnächst mal tun.
Ich denke aber, daß ich ihn bis zum nächsten Termin fertig kriege.
-
Jester schrieb:
Ich sollte ihn vielleicht vorher noch fertig schreiben.
Ja wie... fehlt da noch was? Aber gut, schreib ihn ruhig fertig
")
Da das aber eine gute Ablenkung von meiner Diplomarbeit ist werde ich das wohl demnächst mal tun.
Hehe, viel Erfolg. Ich mach zur Zeit auch alles, außer auf die Recht-Klausur lernen^^
Ich denke aber, daß ich ihn bis zum nächsten Termin fertig kriege.
-
Binary Heaps
Heaps sind eine Datenstruktur, die vor allem bei der Implementierung von Priority-Queues verwendet wird. Die hier vorgestellte Datenstruktur hat nichts mit der Speicherverwaltung von C++ zu tun.
In erster Linie möchte ich binary Heaps vorstellen und zeigen, wie man sie in C++ effizient implementiert. Die Implementierung wird dabei nicht unbedingt mit der, wie sie in klassischen Algorithmenbüchern beschrieben ist, übereinstimmen. Ein Blick dorthinein lohnt sich auf jeden Fall trotzdem noch, um zum Einen eine andere Darstellung zu sehen, und vielleicht auch die klassische Implementierung kennen zu lernen.
Nebenbei wird Heap-Sort, ein Sortierverfahren, das stets mit höchstens 2N*logN Element-Vergleichen sortiert, abfallen. Außerdem wird noch kurz auf die Unterstützung in C++ durch die STL eingehen.1 Heaps - Die Theorie
Zur einfacheren Darstellung treffen wir zunächst eine vereinfachende Annahme, nämlich dass alle Schlüssel ganze Zahlen sind. Letztlich benötigen wir aber nur die Möglichkeit zu vergleichen.
Ein einfacher Heap bietet nach außen nur drei Operationen an:
- getMin, gibt das kleinste Elemente im Heap zurück.
- insert, fügt einen neuen Knoten in den Heap ein.
- deleteMin, löscht den Knoten mit dem kleinsten Schlüssel aus dem Heap.
getMin hat eine Laufzeit von O(1), alle anderen Operationen haben bei der hier vorgestellten Implementierung eine worst-case Laufzeit von O(log n). Insert hat im Schnitt sogar konstante Laufzeit.
Ein binary Heap ist ein Binärbaum, der zusätzlich folgende Eigenschaften erfüllt:
H1) Er ist soweit wie möglich balanciert, nur die letzte Schicht darf nicht voll besetzt sein. Die letzte Schicht muß linksbündig ausgefüllt sein.
H2) Für jeden Knoten gilt: sein Schlüssel ist kleiner als die Schlüssel seiner Kinder.
Eigenschaft H1) wird uns später eine sehr effiziente Implementierung der Baumstruktur erlauben, Eigenschaft H2) garantiert, dass die Operationen wie deleteMin effizient ausgeführt werden können.
Die Reihenfolge der Kinder eines Knotens ist dagegen beliebig und nicht wie bei einem Suchbaum geordnet. Das linke Kind muss nicht das kleinere sein.Kommen wir nun zu den 3 Operationen.
1.1 getMin
Das ist einfach. Aufgrund der Eigenschaft H2) muß die Wurzel der Knoten mit dem keinsten Schlüssel sein. Wir können also einfach die Wurzel zurückgeben. Das geht in konstanter Zeit.
1.2 insert
Die insert-Operation ist schon schwieriger. Wir gehen davon aus, dass wir zu Beginn einen korrekten Heap haben.
Beim Einfügen wird der neue Knoten einfach dort eingehängt, wo der nächste Knoten hin muss: In der untersten Ebene soweit links, wie möglich. Damit ist Eigenschaft H1) erfüllt. Leider ist Eigenschaft H2) noch nicht erfüllt.Um den Heap zu "reparieren" vertauschen wir den neu eingefügten Knoten so lange mit seinem Vater, bis die Eigenschaft erfüllt ist.
Im Pseudo-Code sieht das so aus:solange Schlüssel kleiner als der des Vaterknotens: Vertausche Knoten mit seinem VaterDieses nach oben durchsickern des Knotens heißt auch "sift-up".
Die grünen <-> Pfeile symbolisieren in den folgenden Bildern einen Vergleich, rote Pfeile/Doppelpfeile symbolisieren ein move/swap.
Das Auffinden der richtigen Stelle geht in konstanter Zeit (wie werden wir in der Implementierung sehen). Der gesamte Baum hat Höhe log N, daher kann auch sift-up höchstens log N Schritte brauchen. Im Schnitt sind sogar nur O(1) sift-up Schritte pro Einfügung nötig.
1.3 deleteMin
Im Prinzip müssen wir an dieser Stelle nur die Wurzel des Baumes löschen. Allerdings müssen wir die Datenstruktur anschließend noch wieder reparieren.
An dieser Operation scheiden sich ein bißchen die Geister. Die meisten Lehrbücher, zum Beispiel Sedgewick schlagen folgendes Vorgehen vor:
Entferne die Wurzel und setze an dessen Stelle das Knoten, das am weitesten unten rechts im Baum steht. Dadurch erhalten wir wieder einen Baum, der zumindest Eigenschaft H1) erfüllt. Nun lassen wir die neue Wurzel nach unten durchsickern, bis auch Eigenschaft H2) erfüllt ist. Solange sein Schlüssel nicht kleiner ist, als der seiner beiden Kinder, vertausche ihn mit dem Kind mit dem kleineren Schlüssel.
Dieses nach unten Durchsickern lassen des Knotens heißt auch sift-down. Das Vertauschen des Wurzelknotens mit dem Knoten am weitesten unten rechts, sowie das löschen des Wurzelknotens geht wieder in konstanter Zeit. Der neue Wurzelknoten kann höchstens bis nach ganz unten in den Baum durchsickern. Also hat deleteMin eine Laufzeit von O(log n).
Etwas unschön ist dabei der Vergleich mit beiden Kindern und der beiden Kinder nochmals untereinander. Man kann das zwar mit 2 Vergleichen hinbekommen, indem zunächst das kleinere Kind ermittelt und dann dieses mit dem Knoten, der durchsickern soll vergleicht, aber es gibt auch eine Alternative, die hier mit einem Vergleich auskommt.
1.3 deleteMin - Alternative
Hier soll nun eine andere Implementierung von deleteMin vorgestellt werden, die diesen Makel beseitigt und dadurch etwas schneller sein könnte. Dieses "schneller" ist allerdings mit Vorsicht zu genießen. Auf meinem Rechner ist diese Implementierung für große Datenmengen etwas schneller als die STL-Implementierung.
Die Idee ist, die Wurzel einfach rauszulöschen und das entstehende Loch nach unten durchsickern zu lassen, indem man immer das kleinere Kind nach oben zieht. Das kostet jeweils nur einen Vergleich. Dadurch landet das Loch nach log(n) Schritten in der untersten Ebene. Nun können wir es mit dem Blatt ganz rechts unten im Baum vertauschen und das Loch endlich wegfallen lassen. Nun müssen wir nur noch den getauschten Knoten wieder nach oben durchsickern lassen. Das geht aber im Schnitt sogar in konstanter Zeit.
Im folgenden Bild bedeuten grüne Doppelpfeile einen Vergleich, rote Pfeile move und rote Doppelpfeile swap.
2 Anwendungen
Nachdem nun geklärt ist, was Heaps eigentlich sind und wie sie funktionieren, möchte ich, bevor wir zur Implementierung kommen, noch kurz zwei kleine Anwendungen von Heaps besprechen.
2.1 Priority Queues
Zum Einen werden Heaps verwendet um Priority-Queues zu implementieren. Man baut sich einfach einen Heap mit allen in der Queue befindlichen Elementen auf. Wird das nächste Elemente angefordert, führt man einfach deleteMin aus und gibt das kleinste Element zurück. Das Einfügen in die Queue ist ein simples Einfügen in den Heap.
template <typename T> class PriorityQueue { public: T deleteMin() { T item = heap_.getMin(); heap_.deleteMin(); return item; } void insert(T const& item) { heap_.insert(item); } private: Heap<T> heap_; }Ausgefeiltere Implementieren lassen vielleicht auch noch die Angabe eines Vergleichsoperators zu.
Möchte man allerdings auch Dinge, wie das Löschen von Elementen oder das Verändern von Prioritäten (also Schlüsseln im Heap) unterstützen wird die Sache etwas kniffliger und läßt sich auch nicht mehr ganz so effizient implementieren. Die Performance-Garantien im O-Kalkül können aber eingehalten werden. Mit noch etwas Mehraufwand läßt sich sogar die join-Operation, also die Vereinigung zweier Warteschlangen zu einer großen effizient implementieren. Aber dazu wird es vielleicht irgendwann mal einen eigenen Artikel geben.
2.2 Heapsort
Wie kann man nun mit Heaps sortieren? Auch das ist recht naheliegend.
Man fügt alle Elemente, die man sortieren möchte in den Heap ein und holt sie nacheinander mit deleteMin wieder heraus.Das sind n Insert-Operationen und n delete-Min-Operationen. Beide Einzeloperationen haben jeweils eine Laufzeit von O(log n). Heapsort hat also eine Laufzeit von O(n log n) und gehört damit zu den effizienten Sortierverfahren. Es benötigt immer, auch im worst-case maximal 2n log n Vergleiche.
3 Implementierung
So, nun kommen wir zum spannenden Teil. Wie implementiert man sowas effizient? Den Baum wirklich als Baum mit Parent- und Childpointern abzuspeichern wäre ziemlich ineffizient. Durch den strikten Aufbau des Baumes kann man ihn allerdings sehr einfach in einem Array abspeichern.
Dazu schauen wir uns noch einmal den Baum an und nummerieren die Knoten durch, in dem wir sie Zeile für Zeile jeweils von links nach rechts durchlaufen.
Nun legen wir den Baum in einem Array ab, indem wir jeden Knoten an den Index legen, der seiner Nummerierung entspricht.
Das sieht so aus:[ ?, 2, 4, 6, 7, 9, 8, ? ]Die Frage ist:
Warum beginnnen wir nicht, wie jeder gute Programmierer bei 0 zu zählen?
Außerdem liegen die Daten nun scheinbar willkürlich in dem Array. Wo ist unser schöner Baum geblieben?Man kann sich aber leicht klar machen, daß man anhand der Indizes sehr leicht immer noch im Baum navigieren kann.
Der Index des Vaterknotens von Knoten i ist einfach i/2.
Die Indizes der Kinderknoten von Knoten i sind 2*i und 2*i+1.
Da der Heap in der letzten Reihe von links nach rechts aufgefüllt wird, kann man durch Vergleich der errechneten Indizes mit der aktuellen Heap-Größe herausfinden, ob das Kind existiert.Vielleicht ist das auch ein guter Grund seine Arrays ab 1 zu nummerieren.
Alles was wir brauchen, um im Heap zu navigieren sind also Multiplikationen mit 2, Addition und Division durch 2, sowie einige Vergleiche. Das sind sehr einfache und schnelle Operationen, wir können also auf eine sehr schnelle Implementierung hoffen.
Mit der Platzverschwendung des ersten Elements (Index 0) können wir entweder leben, oder aber vor jedem Array-Zugriff vom errechneten Index noch 1 abziehen. Da wir aber so schnell wie möglich sein wollen verschwenden wir lieber etwas Platz. Zudem macht es die Implementierung etwas einfacher.Nachdem die Idee zur Implementation nun klar ist, können wir loslegen.
3.1 Der Rahmen
template<typename T, size_t MAX_SIZE> class Heap { public: Heap(); T getMin() const; void insert(T const& element); void deleteMin(); private: size_t getFather(size_t i) const { return i/2; } size_t getLeftChild(size_t i) const { return 2*i; } size_t getRightChild(size_t i) const { return 2*i + 1; } bool isRoot(size_t i) const { return i==1; } bool isLastElement(size_t i) const { return i==size_; } size_t getRoot() const { return 1; } bool compare(T const& lhs, T const& rhs) { return lhs < rhs; } T elements_[MAX_SIZE+1]; size_t size_; };Die father/child-Funktionen kapseln die Adressberechnungen, und machen so das Programm lesbarer.
Das ist zunächst mal alles was wir brauchen. Im Konstruktor initialisieren wir den Heap leer. Dazu müssen wir nur die Größe auf 0 setzen.3.2 Konstruktor
template<typename T, size_t MAX_SIZE> Heap::Heap() : size_(0) { }3.3 getMin
Auch getMin ist einfach:
template<typename T, size_t MAX_SIZE> T Heap::getMin() const { assert(size_ != 0); // je nach Geschmack könnte man auch if(...) throw out_of_range schreiben. return elements_[1]; }3.3 insert
So, nun kommen die härteren Brocken. Zur Erinnerung: Bei insert, fügen wir das neue Element in der untersten Zeile des Baums soweit links wie möglich ein und lassen es dann nach oben durchsickern.
template<typename T, size_t MAX_SIZE> void Heap::insert(T const& element) { size_t current = ++size_; size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { // Wir sind noch nicht an der Wurzel und unser Element ist "kleiner" als der Vater // also sickern wir nach oben elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Eine mögliche Optimierung wäre die Platzierung eines Sentinels mit minimalem Key an Stelle 0 im Index. Dann könnte auf die Abfrage !isRoot verzichtet werden. Allerdings gibt es ein solches Element nicht für jeden Typ T.
3.4 deleteMin
Jetzt fehlt nur noch die deleteMin-Methode. Hier wird eine Implementierung der zweiten Variante vorgestellt. Zur Erinnerung: Wir löschen das kleinste Element und füllen die Lücke, indem wir immer das kleinere Kind nach oben ziehen. Anschließend tauschen wir die Lücke mit dem letzten Element des Heaps und lassen es nach oben sickern.
template<typename T, size_t MAX_SIZE> void Heap::deleteMin() { size_t current = getRoot(); size_t child = getLeftChild(current); if(child <= size_) { do { // wenn child nicht das letzte Element (der Knoten also 2 Kindet hat) // wechsle zum rechten Kind, wenn es kleiner ist child += (!isLastElement(child) && compare(elements_[child+1], elements_[child])); elements_[current] = elements_[child]; current = child; child = getLeftChild(current); } while(child <= size_); } // die Lücke ist nun unten angekommen // tausche mit letztem Blatt und vermindere Größe um 1. T element = elements_[size_--]; // jetzt noch das Blatt wieder hochsickern lassen. size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Damit ist auch die letzte Funktion geschafft.
3.5 Details zur Implementierung
Das war's zunächst mal von der Implementierungsseite. Durch die Kapselung der father/child/isRoot etc.-Funktionen könnte man nun auch leicht die Platzverschwendung bei Element 0 loswerden. father(i) = i/2 bleibt, leftchild(i) = (i+1)*2-1 usw. Allerdings muss man auch in den Funktionen einige Vergleiche mit size_ ändern. Ob und wieviel langsamer es danach ist, müsste man mal nachmessen. Dazu habe ich aber gerade keine Lust. Außerdem stört mich der kleine Platzoverhead nicht. Wir hatten ja sogar festgestellt, dass man ihn zum Beispiel als Sentinel nutzen könnte, indem man zum Beispiel bei einem Heap<unsigned int> eine 0 reinschreibt. Auch hier wäre eine Messung interessant, ob es die Performance steigert (laut meinen Messungen bringt es was). Ein heißer Kandidat für solche Messungen ist übrigens heap_sort, oder auch die Verwendung in einer Priority-Queue.
4 Heaps in der STL
Auch die STL bietet eine Implementierung der Datenstruktur Heap, und auch heap-sort ist vorhanden. Die Heaps aus der STL sind Max-Heaps, das heißt an der Wurzel steht das größte Element, nicht wie in unserer Implementierung das Kleinste. Das ist natürlich nur eine Frage des Sortierkriteriums.
Im Header <algorithm> sind folgende Funktionen:
void make_heap(RandomAccessIterator beg,RandomAccessIterator end);Baut in der Range einen Heap, indem es die Elemente so umsortiert, daß an der der Stelle beg das größte Element steht.
void push_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß die Range [beg, end-1) bereits ein heap ist und fügt diesem das Element an der Stelle end hinzu.
void pop_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß [big, end) ein Heap ist und nimmt das größte Element aus dem Heap heraus und legt es an der nun frei werdenden Stelle end ab.
sort_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, daß [beg, end) ein heap ist und wandelt diesen in eine sortierte Folge um. Danach ist die Sequenz kein Heap mehr!
Jede dieser Funktionen gibt es auch noch in einer weiteren Variante mit einem zusätzlichen Parameter um das Sortierkriterium festzulegen. Das folgende Codestück zeigt wie diese Funktionen verwendet werden. Dabei ist zu beachten, dass beim STL-Heap das größte Element Wurzel des Baums ist. Dies hat den Vorteil, dass nachdem alle Elemente aus dem Heap entfernt wurden, das Array direkt aufsteigend sortiert ist.
int data[10] = {11,5,14,12,3,4,9, 8, 20}; make_heap(data,data+9); // erstelle heap, der alle Elemente außer der 20 enhält cout << "groesstes Element: " << data[0] << "\n"; push_heap(data,data+10); // füge 20 hinzu cout << "Neues groesstes Element: " << data[0] << "\n"; cout << "Entferne alle Elemente aus dem Heap: "; for(size_t i=10; i>0;--i) { cout << data[0] << " "; pop_heap(data,data+i); } cout << "\nInhalt des Arrays am Ende: "; for(size_t i=0;i<10;++i) { cout << data[i] << " "; }5 Ausblick
In diesem Artikel wurde gezeigt, was ein binary Heap ist und wie man ihn implementiert. Es sind aber auch noch einige Dinge offen: Der hier vorgestellte Heap ist statisch. Wer ihn dynamisch wachseln lassen möchte, könnte als zugrundeliegende Datenstruktur einen std::vector benutzen. Interessant wäre es auch, das Array über einen Pointer zu adressieren und ähnlich wie die STL-Variante den Heap inplace in einem gegebenen Speicherbereich zu erzeugen. Diese Funktionalität könnte man über einen eigenen Konstruktor bereitstellen. Außerdem wäre es nett wenn man die Vergleichsfunktion mit angeben könnte. Durch die Verwendug der compare-Funktion für alle Elemente-Vergleiche sollte das kein Problem sein.
Interessant für eine flexiblere Priority Queue ist die Möglichkeit Elemente auch wieder zu löschen oder ihren Key zu verändern (vor allem verkleinern). Da es keine Möglichkeit gibt in einem Heap effizient zu suchen, müßte der Index des Knotens, der gelöscht werden soll bekannt sein. Dann könnte man ihn einfach mit dem letzten Blatt vertauschen, sodaß er gelöscht werden kann. Anschließend muß man reingetauschten Knoten noch nach unten durchsickern lassen. Möglicherweise wäre es dann interessant, doch eine Funktion siftdown(i) zu implementieren, die das übernimmt. Der Code ist im Prinzip vorhanden. Es ist klar, dass diese Operation in O(log n) Zeit läuft. Damit läßt sich auch das ändern eines Keys über remove/insert implementieren. Die Laufzeit ist ebenfalls O(log n) Zeit.
Es gibt noch weitere Heaps, man könnte zum Beispiel einen 4-ary Heap oder gar Bäume mit noch höherem Grad bauen. Da viele aktuelle Prozessorarchitekturen allerdings sehr wenig Register haben wird das nicht viel Effizienter als ein binary Heap. In Zukunft könnte das aber anders aussehen. Unterschiedliche Heap-Varianten bieten unterschiedliche Laufzeitgarantien. Für spezielle Anwendungen und wenn es auf Performance wirklich ankommt, lohnt sich also ein Blick auf http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29. Vielleicht wird es auch noch einen zweiten Teil dieses Artikels geben, in dem dann Pairing-Heaps und Fibonacci-Heaps vorgestellt werden.
6 Quellen
- http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29
- Algorithmen in C++, Robert Sedgewick, Addison-Wesley (1999)
- Vorlesungsfolien "Algorithm Engineering", Prof. Sanders, Uni KA(SS06)
- The C++ Standard Library, Nicolai M. Josuttis, Addison-Wesley (1999)
-
So, ich bin jetzt nochmal über den kompletten Text drüber. Der Code muss noch überarbeitet werden, das mache ich als nächstes. Danach nochmal komplett lesen und dann kommt's auf [R], oder wie war das richtige Kürzel?
-
Wenn die Tippfehler raus sollen, ist R richtig.
-
Binary Heaps
Heaps sind eine Datenstruktur, die vor allem bei der Implementierung von Priority-Queues verwendet wird. Die hier vorgestellte Datenstruktur hat nichts mit der Speicherverwaltung von C++ zu tun.
In erster Linie möchte ich binary Heaps vorstellen und zeigen, wie man sie in C++ effizient implementiert. Die Implementierung wird dabei nicht unbedingt mit der, wie sie in klassischen Algorithmenbüchern beschrieben ist, übereinstimmen. Ein Blick dorthinein lohnt sich auf jeden Fall trotzdem noch, um zum Einen eine andere Darstellung zu sehen, und vielleicht auch die klassische Implementierung kennen zu lernen.
Nebenbei wird Heap-Sort, ein Sortierverfahren, das stets mit höchstens 2N*logN Element-Vergleichen sortiert, abfallen. Außerdem wird noch kurz auf die Unterstützung in C++ durch die STL eingegangen.1 Heaps - Die Theorie
Zur einfacheren Darstellung treffen wir zunächst eine vereinfachende Annahme, nämlich dass alle Schlüssel ganze Zahlen sind. Letztlich benötigen wir aber nur die Möglichkeit zu vergleichen.
Ein einfacher Heap bietet nach außen nur drei Operationen an:
- getMin, gibt das kleinste Elemente im Heap zurück.
- insert, fügt einen neuen Knoten in den Heap ein.
- deleteMin, löscht den Knoten mit dem kleinsten Schlüssel aus dem Heap.
getMin hat eine Laufzeit von O(1), alle anderen Operationen haben bei der hier vorgestellten Implementierung eine worst-case Laufzeit von O(log n). Insert hat im Schnitt sogar konstante Laufzeit.
Ein binary Heap ist ein Binärbaum, der zusätzlich folgende Eigenschaften erfüllt:
H1) Er ist soweit wie möglich balanciert, nur die letzte Schicht darf nicht voll besetzt sein. Die letzte Schicht muss linksbündig ausgefüllt sein.
H2) Für jeden Knoten gilt: sein Schlüssel ist kleiner als die Schlüssel seiner Kinder.
Eigenschaft H1) wird uns später eine sehr effiziente Implementierung der Baumstruktur erlauben, Eigenschaft H2) garantiert, dass die Operationen wie deleteMin effizient ausgeführt werden können.
Die Reihenfolge der Kinder eines Knotens ist dagegen beliebig und nicht wie bei einem Suchbaum geordnet. Das linke Kind muss nicht das kleinere sein.Kommen wir nun zu den 3 Operationen.
1.1 getMin
Das ist einfach. Aufgrund der Eigenschaft H2) muss die Wurzel der Knoten mit dem kleinsten Schlüssel sein. Wir können also einfach die Wurzel zurückgeben. Das geht in konstanter Zeit.
1.2 insert
Die insert-Operation ist schon schwieriger. Wir gehen davon aus, dass wir zu Beginn einen korrekten Heap haben.
Beim Einfügen wird der neue Knoten einfach dort eingehängt, wo der nächste Knoten hin muss: In der untersten Ebene soweit links, wie möglich. Damit ist Eigenschaft H1) erfüllt. Leider ist Eigenschaft H2) noch nicht erfüllt.Um den Heap zu "reparieren" vertauschen wir den neu eingefügten Knoten so lange mit seinem Vater, bis die Eigenschaft erfüllt ist.
Im Pseudo-Code sieht das so aus:solange Schlüssel kleiner als der des Vaterknotens: Vertausche Knoten mit seinem VaterDieses nach oben Durchsickern des Knotens heißt auch "sift-up".
Die grünen <-> Pfeile symbolisieren in den folgenden Bildern einen Vergleich, rote Pfeile/Doppelpfeile symbolisieren ein move/swap.
Das Auffinden der richtigen Stelle geht in konstanter Zeit (wie, werden wir in der Implementierung sehen). Der gesamte Baum hat die Höhe log N, daher kann auch sift-up höchstens log N Schritte brauchen. Im Schnitt sind sogar nur O(1) sift-up Schritte pro Einfügung nötig.
1.3 deleteMin
Im Prinzip müssen wir an dieser Stelle nur die Wurzel des Baumes löschen. Allerdings müssen wir die Datenstruktur anschließend noch wieder reparieren.
An dieser Operation scheiden sich ein bisschen die Geister. Die meisten Lehrbücher, zum Beispiel Sedgewick, schlagen folgendes Vorgehen vor:
Entferne die Wurzel und setze an deren Stelle den Knoten, der am weitesten unten rechts im Baum steht. Dadurch erhalten wir wieder einen Baum, der zumindest Eigenschaft H1) erfüllt. Nun lassen wir die neue Wurzel nach unten durchsickern, bis auch Eigenschaft H2) erfüllt ist. Solange sein Schlüssel nicht kleiner ist, als der seiner beiden Kinder, vertausche ihn mit dem Kind mit dem kleineren Schlüssel.
Dieses nach unten Durchsickernlassen des Knotens heißt auch sift-down. Das Vertauschen des Wurzelknotens mit dem Knoten am weitesten unten rechts, sowie das Löschen des Wurzelknotens, geht wieder in konstanter Zeit. Der neue Wurzelknoten kann höchstens bis nach ganz unten in den Baum durchsickern. Also hat deleteMin eine Laufzeit von O(log n).
Etwas unschön ist dabei der Vergleich mit beiden Kindern und der beiden Kinder nochmals untereinander. Man kann das zwar mit 2 Vergleichen hinbekommen, indem zunächst das kleinere Kind ermittelt und dann dieses mit dem Knoten, der durchsickern soll vergleicht, aber es gibt auch eine Alternative, die hier mit einem Vergleich auskommt.
1.3 deleteMin - Alternative
Hier soll nun eine andere Implementierung von deleteMin vorgestellt werden, die diesen Makel beseitigt und dadurch etwas schneller sein könnte. Dieses "schneller" ist allerdings mit Vorsicht zu genießen. Auf meinem Rechner ist diese Implementierung für große Datenmengen etwas schneller als die STL-Implementierung.
Die Idee ist, die Wurzel einfach rauszulöschen und das entstehende Loch nach unten durchsickern zu lassen, indem man immer das kleinere Kind nach oben zieht. Das kostet jeweils nur einen Vergleich. Dadurch landet das Loch nach log(n) Schritten in der untersten Ebene. Nun können wir es mit dem Blatt ganz rechts unten im Baum vertauschen und das Loch endlich wegfallen lassen. Nun müssen wir nur noch den getauschten Knoten wieder nach oben durchsickern lassen. Das geht aber im Schnitt sogar in konstanter Zeit.
Im folgenden Bild bedeuten grüne Doppelpfeile einen Vergleich, rote Pfeile move und rote Doppelpfeile swap.
2 Anwendungen
Nachdem nun geklärt ist, was Heaps eigentlich sind und wie sie funktionieren, möchte ich, bevor wir zur Implementierung kommen, noch kurz zwei kleine Anwendungen von Heaps besprechen.
2.1 Priority Queues
Zum Einen werden Heaps verwendet, um Priority-Queues zu implementieren. Man baut sich einfach einen Heap mit allen in der Queue befindlichen Elementen auf. Wird das nächste Elemente angefordert, führt man einfach deleteMin aus und gibt das kleinste Element zurück. Das Einfügen in die Queue ist ein simples Einfügen in den Heap.
template <typename T> class PriorityQueue { public: T deleteMin() { T item = heap_.getMin(); heap_.deleteMin(); return item; } void insert(T const& item) { heap_.insert(item); } private: Heap<T> heap_; }Ausgefeiltere Implementierungen lassen vielleicht auch noch die Angabe eines Vergleichsoperators zu.
Möchte man allerdings auch Dinge, wie das Löschen von Elementen oder das Verändern von Prioritäten (also Schlüsseln im Heap) unterstützen, wird die Sache etwas kniffliger und lässt sich auch nicht mehr ganz so effizient implementieren. Die Performance-Garantien im O-Kalkül können aber eingehalten werden. Mit noch etwas Mehraufwand lässt sich sogar die join-Operation, also die Vereinigung zweier Warteschlangen zu einer großen effizient implementieren. Aber dazu wird es vielleicht irgendwann mal einen eigenen Artikel geben.
2.2 Heapsort
Wie kann man nun mit Heaps sortieren? Auch das ist recht naheliegend.
Man fügt alle Elemente, die man sortieren möchte, in den Heap ein und holt sie nacheinander mit deleteMin wieder heraus.Das sind n Insert-Operationen und n delete-Min-Operationen. Beide Einzeloperationen haben jeweils eine Laufzeit von O(log n). Heapsort hat also eine Laufzeit von O(n log n) und gehört damit zu den effizienten Sortierverfahren. Es benötigt immer, auch im worst-case maximal 2n log n Vergleiche.
3 Implementierung
So, nun kommen wir zum spannenden Teil. Wie implementiert man sowas effizient? Den Baum wirklich als Baum mit Parent- und Childpointern abzuspeichern wäre ziemlich ineffizient. Durch den strikten Aufbau des Baumes kann man ihn allerdings sehr einfach in einem Array abspeichern.
Dazu schauen wir uns noch einmal den Baum an und nummerieren die Knoten durch, indem wir sie Zeile für Zeile jeweils von links nach rechts durchlaufen.
Nun legen wir den Baum in einem Array ab, indem wir jeden Knoten an den Index legen, der seiner Nummerierung entspricht.
Das sieht so aus:[ ?, 2, 4, 6, 7, 9, 8, ? ]Die Frage ist:
Warum beginnnen wir nicht, wie jeder gute Programmierer bei 0 zu zählen?
Außerdem liegen die Daten nun scheinbar willkürlich in dem Array. Wo ist unser schöner Baum geblieben?Man kann sich aber leicht klar machen, dass man anhand der Indizes sehr leicht immer noch im Baum navigieren kann.
Der Index des Vaterknotens von Knoten i ist einfach i/2.
Die Indizes der Kinderknoten von Knoten i sind 2*i und 2*i+1.
Da der Heap in der letzten Reihe von links nach rechts aufgefüllt wird, kann man durch Vergleich der errechneten Indizes mit der aktuellen Heap-Größe herausfinden, ob das Kind existiert.Vielleicht ist das auch ein guter Grund, seine Arrays ab 1 zu nummerieren.
Alles was wir brauchen, um im Heap zu navigieren sind also Multiplikationen mit 2, Addition und Division durch 2, sowie einige Vergleiche. Das sind sehr einfache und schnelle Operationen, wir können also auf eine sehr schnelle Implementierung hoffen.
Mit der Platzverschwendung des ersten Elements (Index 0) können wir entweder leben, oder aber vor jedem Array-Zugriff vom errechneten Index noch 1 abziehen. Da wir aber so schnell wie möglich sein wollen, verschwenden wir lieber etwas Platz. Zudem macht es die Implementierung etwas einfacher.Nachdem die Idee zur Implementation nun klar ist, können wir loslegen.
3.1 Der Rahmen
template<typename T, size_t MAX_SIZE> class Heap { public: Heap(); T getMin() const; void insert(T const& element); void deleteMin(); private: size_t getFather(size_t i) const { return i/2; } size_t getLeftChild(size_t i) const { return 2*i; } size_t getRightChild(size_t i) const { return 2*i + 1; } bool isRoot(size_t i) const { return i==1; } bool isLastElement(size_t i) const { return i==size_; } size_t getRoot() const { return 1; } bool compare(T const& lhs, T const& rhs) { return lhs < rhs; } T elements_[MAX_SIZE+1]; size_t size_; };Die father/child-Funktionen kapseln die Adressberechnungen, und machen so das Programm lesbarer.
Das ist zunächst mal alles was wir brauchen. Im Konstruktor initialisieren wir den Heap leer. Dazu müssen wir nur die Größe auf 0 setzen.3.2 Konstruktor
template<typename T, size_t MAX_SIZE> Heap::Heap() : size_(0) { }3.3 getMin
Auch getMin ist einfach:
template<typename T, size_t MAX_SIZE> T Heap::getMin() const { assert(size_ != 0); // je nach Geschmack könnte man auch if(...) throw out_of_range schreiben. return elements_[1]; }3.3 insert
So, nun kommen die härteren Brocken. Zur Erinnerung: Bei insert fügen wir das neue Element in der untersten Zeile des Baums soweit links wie möglich ein und lassen es dann nach oben durchsickern.
template<typename T, size_t MAX_SIZE> void Heap::insert(T const& element) { size_t current = ++size_; size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { // Wir sind noch nicht an der Wurzel und unser Element ist "kleiner" als der Vater // also sickern wir nach oben elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Eine mögliche Optimierung wäre die Platzierung eines Sentinels mit minimalem Key an Stelle 0 im Index. Dann könnte auf die Abfrage !isRoot verzichtet werden. Allerdings gibt es ein solches Element nicht für jeden Typ T.
3.4 deleteMin
Jetzt fehlt nur noch die deleteMin-Methode. Hier wird eine Implementierung der zweiten Variante vorgestellt. Zur Erinnerung: Wir löschen das kleinste Element und füllen die Lücke, indem wir immer das kleinere Kind nach oben ziehen. Anschließend tauschen wir die Lücke mit dem letzten Element des Heaps und lassen es nach oben sickern.
template<typename T, size_t MAX_SIZE> void Heap::deleteMin() { size_t current = getRoot(); size_t child = getLeftChild(current); if(child <= size_) { do { // wenn child nicht das letzte Element (der Knoten also 2 Kinder hat) // wechsle zum rechten Kind, wenn es kleiner ist child += (!isLastElement(child) && compare(elements_[child+1], elements_[child])); elements_[current] = elements_[child]; current = child; child = getLeftChild(current); } while(child <= size_); } // die Lücke ist nun unten angekommen // tausche mit letztem Blatt und vermindere Größe um 1. T element = elements_[size_--]; // jetzt noch das Blatt wieder hochsickern lassen. size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Damit ist auch die letzte Funktion geschafft.
3.5 Details zur Implementierung
Das war's zunächst mal von der Implementierungsseite. Durch die Kapselung der father/child/isRoot etc.-Funktionen könnte man nun auch leicht die Platzverschwendung bei Element 0 loswerden. father(i) = i/2 bleibt, leftchild(i) = (i+1)*2-1 usw. Allerdings muss man auch in den Funktionen einige Vergleiche mit size_ ändern. Ob und wieviel langsamer es danach ist, müsste man mal nachmessen. Dazu habe ich aber gerade keine Lust. Außerdem stört mich der kleine Platzoverhead nicht. Wir hatten ja sogar festgestellt, dass man ihn als Sentinel nutzen könnte, indem man zum Beispiel bei einem Heap<unsigned int> eine 0 reinschreibt. Auch hier wäre eine Messung interessant, ob es die Performance steigert (laut meinen Messungen bringt es was). Ein heißer Kandidat für solche Messungen ist übrigens heap_sort, oder auch die Verwendung in einer Priority-Queue.
4 Heaps in der STL
Auch die STL bietet eine Implementierung der Datenstruktur Heap, und auch heap-sort ist vorhanden. Die Heaps aus der STL sind Max-Heaps, das heißt an der Wurzel steht das größte Element, nicht wie in unserer Implementierung das kleinste. Das ist natürlich nur eine Frage des Sortierkriteriums.
Im Header <algorithm> sind folgende Funktionen:
void make_heap(RandomAccessIterator beg, RandomAccessIterator end);Baut in der Range einen Heap, indem es die Elemente so umsortiert, dass an der Stelle beg das größte Element steht.
void push_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass die Range [beg, end-1) bereits ein Heap ist und fügt diesem das Element an der Stelle end hinzu.
void pop_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass [big, end) ein Heap ist und nimmt das größte Element aus dem Heap heraus und legt es an der nun frei werdenden Stelle end ab.
sort_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass [beg, end) ein Heap ist und wandelt diesen in eine sortierte Folge um. Danach ist die Sequenz kein Heap mehr!
Jede dieser Funktionen gibt es auch noch in einer weiteren Variante mit einem zusätzlichen Parameter, um das Sortierkriterium festzulegen. Das folgende Codestück zeigt, wie diese Funktionen verwendet werden. Dabei ist zu beachten, dass beim STL-Heap das größte Element Wurzel des Baums ist. Dies hat den Vorteil, dass nachdem alle Elemente aus dem Heap entfernt wurden, das Array direkt aufsteigend sortiert ist.
int data[10] = {11,5,14,12,3,4,9, 8, 20}; make_heap(data,data+9); // erstelle heap, der alle Elemente außer der 20 enhält cout << "groesstes Element: " << data[0] << "\n"; push_heap(data,data+10); // füge 20 hinzu cout << "Neues groesstes Element: " << data[0] << "\n"; cout << "Entferne alle Elemente aus dem Heap: "; for(size_t i=10; i>0;--i) { cout << data[0] << " "; pop_heap(data,data+i); } cout << "\nInhalt des Arrays am Ende: "; for(size_t i=0;i<10;++i) { cout << data[i] << " "; }5 Ausblick
In diesem Artikel wurde gezeigt, was ein binary Heap ist und wie man ihn implementiert. Es sind aber auch noch einige Dinge offen: Der hier vorgestellte Heap ist statisch. Wer ihn dynamisch wachsen lassen möchte, könnte als zugrundeliegende Datenstruktur einen std::vector benutzen. Interessant wäre es auch, das Array über einen Pointer zu adressieren und ähnlich wie die STL-Variante den Heap inplace in einem gegebenen Speicherbereich zu erzeugen. Diese Funktionalität könnte man über einen eigenen Konstruktor bereitstellen. Außerdem wäre es nett, wenn man die Vergleichsfunktion mit angeben könnte. Durch die Verwendug der compare-Funktion für alle Elemente-Vergleiche sollte das kein Problem sein.
Interessant für eine flexiblere Priority-Queue ist die Möglichkeit, Elemente auch wieder zu löschen oder ihren Key zu verändern (vor allem verkleinern). Da es keine Möglichkeit gibt, in einem Heap effizient zu suchen, müsste der Index des Knotens, der gelöscht werden soll, bekannt sein. Dann könnte man ihn einfach mit dem letzten Blatt vertauschen, sodass er gelöscht werden kann. Anschließend muss man den reingetauschten Knoten noch nach unten durchsickern lassen. Möglicherweise wäre es dann interessant, doch eine Funktion siftdown(i) zu implementieren, die das übernimmt. Der Code ist im Prinzip vorhanden. Es ist klar, dass diese Operation in O(log n) Zeit läuft. Damit lässt sich auch das Ändern eines Keys über remove/insert implementieren. Die Laufzeit ist ebenfalls O(log n) Zeit.
Es gibt noch weitere Heaps, man könnte zum Beispiel einen 4-ary Heap oder gar Bäume mit noch höherem Grad bauen. Da viele aktuelle Prozessorarchitekturen allerdings sehr wenig Register haben, wird das nicht viel effizienter als ein binary Heap. In Zukunft könnte das aber anders aussehen. Unterschiedliche Heap-Varianten bieten unterschiedliche Laufzeitgarantien. Für spezielle Anwendungen und wenn es auf Performance wirklich ankommt, lohnt sich also ein Blick auf http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29. Vielleicht wird es auch noch einen zweiten Teil dieses Artikels geben, in dem dann Pairing-Heaps und Fibonacci-Heaps vorgestellt werden.
6 Quellen
- http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29
- Algorithmen in C++, Robert Sedgewick, Addison-Wesley (1999)
- Vorlesungsfolien "Algorithm Engineering", Prof. Sanders, Uni KA(SS06)
- The C++ Standard Library, Nicolai M. Josuttis, Addison-Wesley (1999)
-
Hi Jester.
Folgendes ist mir während des Korrigierens noch aufgefallen.
In Abschnitt 4, bei push_heap:
Erwartet, dass die Range [beg, end-1) bereits ein Heap ist und fügt diesem das Element an der Stelle end hinzu.
Müsste das nicht end-1 heißen?
Genauso bei pop_heap:
Erwartet, dass [big, end) ein Heap ist und nimmt das größte Element aus dem Heap heraus und legt es an der nun frei werdenden Stelle end ab.
Btw, schöner Artikel.
-
Danke für die schnelle Korrektur! Ich werde sehen, dass ich sie heute abend noch umsetze.
-
Binary Heaps
Heaps sind eine Datenstruktur, die vor allem bei der Implementierung von Priority-Queues verwendet wird. Die hier vorgestellte Datenstruktur hat nichts mit der Speicherverwaltung von C++ zu tun.
In erster Linie möchte ich binary Heaps vorstellen und zeigen, wie man sie in C++ effizient implementiert. Die Implementierung wird dabei nicht unbedingt mit der, wie sie in klassischen Algorithmenbüchern beschrieben ist, übereinstimmen. Ein Blick dorthinein lohnt sich auf jeden Fall trotzdem noch, um zum Einen eine andere Darstellung zu sehen, und vielleicht auch die klassische Implementierung kennen zu lernen.
Nebenbei wird Heap-Sort, ein Sortierverfahren, das stets mit höchstens 2N*logN Element-Vergleichen sortiert, abfallen. Außerdem wird noch kurz auf die Unterstützung in C++ durch die STL eingegangen.1 Heaps - Die Theorie
Zur einfacheren Darstellung treffen wir zunächst eine vereinfachende Annahme, nämlich dass alle Schlüssel ganze Zahlen sind. Letztlich benötigen wir aber nur die Möglichkeit zu vergleichen.
Ein einfacher Heap bietet nach außen nur drei Operationen an:
- getMin, gibt das kleinste Elemente im Heap zurück.
- insert, fügt einen neuen Knoten in den Heap ein.
- deleteMin, löscht den Knoten mit dem kleinsten Schlüssel aus dem Heap.
getMin hat eine Laufzeit von O(1), alle anderen Operationen haben bei der hier vorgestellten Implementierung eine worst-case Laufzeit von O(log n). Insert hat im Schnitt sogar konstante Laufzeit.
Ein binary Heap ist ein Binärbaum, der zusätzlich folgende Eigenschaften erfüllt:
H1) Er ist soweit wie möglich balanciert, nur die letzte Schicht darf nicht voll besetzt sein. Die letzte Schicht muss linksbündig ausgefüllt sein.
H2) Für jeden Knoten gilt: sein Schlüssel ist kleiner als die Schlüssel seiner Kinder.
Eigenschaft H1) wird uns später eine sehr effiziente Implementierung der Baumstruktur erlauben, Eigenschaft H2) garantiert, dass die Operationen wie deleteMin effizient ausgeführt werden können.
Die Reihenfolge der Kinder eines Knotens ist dagegen beliebig und nicht wie bei einem Suchbaum geordnet. Das linke Kind muss nicht das kleinere sein.Kommen wir nun zu den 3 Operationen.
1.1 getMin
Das ist einfach. Aufgrund der Eigenschaft H2) muss die Wurzel der Knoten mit dem kleinsten Schlüssel sein. Wir können also einfach die Wurzel zurückgeben. Das geht in konstanter Zeit.
1.2 insert
Die insert-Operation ist schon schwieriger. Wir gehen davon aus, dass wir zu Beginn einen korrekten Heap haben.
Beim Einfügen wird der neue Knoten einfach dort eingehängt, wo der nächste Knoten hin muss: In der untersten Ebene soweit links, wie möglich. Damit ist Eigenschaft H1) erfüllt. Leider ist Eigenschaft H2) noch nicht erfüllt.Um den Heap zu "reparieren" vertauschen wir den neu eingefügten Knoten so lange mit seinem Vater, bis die Eigenschaft erfüllt ist.
Im Pseudo-Code sieht das so aus:solange Schlüssel kleiner als der des Vaterknotens: Vertausche Knoten mit seinem VaterDieses nach oben Durchsickern des Knotens heißt auch "sift-up".
Die grünen <-> Pfeile symbolisieren in den folgenden Bildern einen Vergleich, rote Pfeile/Doppelpfeile symbolisieren ein move/swap.
Das Auffinden der richtigen Stelle geht in konstanter Zeit (wie, werden wir in der Implementierung sehen). Der gesamte Baum hat die Höhe log N, daher kann auch sift-up höchstens log N Schritte brauchen. Im Schnitt sind sogar nur O(1) sift-up Schritte pro Einfügung nötig.
1.3 deleteMin
Im Prinzip müssen wir an dieser Stelle nur die Wurzel des Baumes löschen. Allerdings müssen wir die Datenstruktur anschließend noch wieder reparieren.
An dieser Operation scheiden sich ein bisschen die Geister. Die meisten Lehrbücher, zum Beispiel Sedgewick, schlagen folgendes Vorgehen vor:
Entferne die Wurzel und setze an deren Stelle den Knoten, der am weitesten unten rechts im Baum steht. Dadurch erhalten wir wieder einen Baum, der zumindest Eigenschaft H1) erfüllt. Nun lassen wir die neue Wurzel nach unten durchsickern, bis auch Eigenschaft H2) erfüllt ist. Solange sein Schlüssel nicht kleiner ist, als der seiner beiden Kinder, vertausche ihn mit dem Kind mit dem kleineren Schlüssel.
Dieses nach unten Durchsickernlassen des Knotens heißt auch sift-down. Das Vertauschen des Wurzelknotens mit dem Knoten am weitesten unten rechts, sowie das Löschen des Wurzelknotens, geht wieder in konstanter Zeit. Der neue Wurzelknoten kann höchstens bis nach ganz unten in den Baum durchsickern. Also hat deleteMin eine Laufzeit von O(log n).
Etwas unschön ist dabei der Vergleich mit beiden Kindern und der beiden Kinder nochmals untereinander. Man kann das zwar mit 2 Vergleichen hinbekommen, indem zunächst das kleinere Kind ermittelt und dann dieses mit dem Knoten, der durchsickern soll vergleicht, aber es gibt auch eine Alternative, die hier mit einem Vergleich auskommt.
1.3 deleteMin - Alternative
Hier soll nun eine andere Implementierung von deleteMin vorgestellt werden, die diesen Makel beseitigt und dadurch etwas schneller sein könnte. Dieses "schneller" ist allerdings mit Vorsicht zu genießen. Auf meinem Rechner ist diese Implementierung für große Datenmengen etwas schneller als die STL-Implementierung.
Die Idee ist, die Wurzel einfach rauszulöschen und das entstehende Loch nach unten durchsickern zu lassen, indem man immer das kleinere Kind nach oben zieht. Das kostet jeweils nur einen Vergleich. Dadurch landet das Loch nach log(n) Schritten in der untersten Ebene. Nun können wir es mit dem Blatt ganz rechts unten im Baum vertauschen und das Loch endlich wegfallen lassen. Nun müssen wir nur noch den getauschten Knoten wieder nach oben durchsickern lassen. Das geht aber im Schnitt sogar in konstanter Zeit.
Im folgenden Bild bedeuten grüne Doppelpfeile einen Vergleich, rote Pfeile move und rote Doppelpfeile swap.
2 Anwendungen
Nachdem nun geklärt ist, was Heaps eigentlich sind und wie sie funktionieren, möchte ich, bevor wir zur Implementierung kommen, noch kurz zwei kleine Anwendungen von Heaps besprechen.
2.1 Priority Queues
Zum Einen werden Heaps verwendet, um Priority-Queues zu implementieren. Man baut sich einfach einen Heap mit allen in der Queue befindlichen Elementen auf. Wird das nächste Elemente angefordert, führt man einfach deleteMin aus und gibt das kleinste Element zurück. Das Einfügen in die Queue ist ein simples Einfügen in den Heap.
template <typename T> class PriorityQueue { public: T deleteMin() { T item = heap_.getMin(); heap_.deleteMin(); return item; } void insert(T const& item) { heap_.insert(item); } private: Heap<T> heap_; }Ausgefeiltere Implementierungen lassen vielleicht auch noch die Angabe eines Vergleichsoperators zu.
Möchte man allerdings auch Dinge, wie das Löschen von Elementen oder das Verändern von Prioritäten (also Schlüsseln im Heap) unterstützen, wird die Sache etwas kniffliger und lässt sich auch nicht mehr ganz so effizient implementieren. Die Performance-Garantien im O-Kalkül können aber eingehalten werden. Mit noch etwas Mehraufwand lässt sich sogar die join-Operation, also die Vereinigung zweier Warteschlangen zu einer großen effizient implementieren. Aber dazu wird es vielleicht irgendwann mal einen eigenen Artikel geben.
2.2 Heapsort
Wie kann man nun mit Heaps sortieren? Auch das ist recht naheliegend.
Man fügt alle Elemente, die man sortieren möchte, in den Heap ein und holt sie nacheinander mit deleteMin wieder heraus.Das sind n Insert-Operationen und n delete-Min-Operationen. Beide Einzeloperationen haben jeweils eine Laufzeit von O(log n). Heapsort hat also eine Laufzeit von O(n log n) und gehört damit zu den effizienten Sortierverfahren. Es benötigt immer, auch im worst-case maximal 2n log n Vergleiche.
3 Implementierung
So, nun kommen wir zum spannenden Teil. Wie implementiert man sowas effizient? Den Baum wirklich als Baum mit Parent- und Childpointern abzuspeichern wäre ziemlich ineffizient. Durch den strikten Aufbau des Baumes kann man ihn allerdings sehr einfach in einem Array abspeichern.
Dazu schauen wir uns noch einmal den Baum an und nummerieren die Knoten durch, indem wir sie Zeile für Zeile jeweils von links nach rechts durchlaufen.
Nun legen wir den Baum in einem Array ab, indem wir jeden Knoten an den Index legen, der seiner Nummerierung entspricht.
Das sieht so aus:[ ?, 2, 4, 6, 7, 9, 8, ? ]Die Frage ist:
Warum beginnnen wir nicht, wie jeder gute Programmierer bei 0 zu zählen?
Außerdem liegen die Daten nun scheinbar willkürlich in dem Array. Wo ist unser schöner Baum geblieben?Man kann sich aber leicht klar machen, dass man anhand der Indizes sehr leicht immer noch im Baum navigieren kann.
Der Index des Vaterknotens von Knoten i ist einfach i/2.
Die Indizes der Kinderknoten von Knoten i sind 2*i und 2*i+1.
Da der Heap in der letzten Reihe von links nach rechts aufgefüllt wird, kann man durch Vergleich der errechneten Indizes mit der aktuellen Heap-Größe herausfinden, ob das Kind existiert.Vielleicht ist das auch ein guter Grund, seine Arrays ab 1 zu nummerieren.
Alles was wir brauchen, um im Heap zu navigieren sind also Multiplikationen mit 2, Addition und Division durch 2, sowie einige Vergleiche. Das sind sehr einfache und schnelle Operationen, wir können also auf eine sehr schnelle Implementierung hoffen.
Mit der Platzverschwendung des ersten Elements (Index 0) können wir entweder leben, oder aber vor jedem Array-Zugriff vom errechneten Index noch 1 abziehen. Da wir aber so schnell wie möglich sein wollen, verschwenden wir lieber etwas Platz. Zudem macht es die Implementierung etwas einfacher.Nachdem die Idee zur Implementation nun klar ist, können wir loslegen.
3.1 Der Rahmen
template<typename T, size_t MAX_SIZE> class Heap { public: Heap(); T getMin() const; void insert(T const& element); void deleteMin(); private: size_t getFather(size_t i) const { return i/2; } size_t getLeftChild(size_t i) const { return 2*i; } size_t getRightChild(size_t i) const { return 2*i + 1; } bool isRoot(size_t i) const { return i==1; } bool isLastElement(size_t i) const { return i==size_; } size_t getRoot() const { return 1; } bool compare(T const& lhs, T const& rhs) { return lhs < rhs; } T elements_[MAX_SIZE+1]; size_t size_; };Die father/child-Funktionen kapseln die Adressberechnungen, und machen so das Programm lesbarer.
Das ist zunächst mal alles was wir brauchen. Im Konstruktor initialisieren wir den Heap leer. Dazu müssen wir nur die Größe auf 0 setzen.3.2 Konstruktor
template<typename T, size_t MAX_SIZE> Heap::Heap() : size_(0) { }3.3 getMin
Auch getMin ist einfach:
template<typename T, size_t MAX_SIZE> T Heap::getMin() const { assert(size_ != 0); // je nach Geschmack könnte man auch if(...) throw out_of_range schreiben. return elements_[1]; }3.3 insert
So, nun kommen die härteren Brocken. Zur Erinnerung: Bei insert fügen wir das neue Element in der untersten Zeile des Baums soweit links wie möglich ein und lassen es dann nach oben durchsickern.
template<typename T, size_t MAX_SIZE> void Heap::insert(T const& element) { size_t current = ++size_; size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { // Wir sind noch nicht an der Wurzel und unser Element ist "kleiner" als der Vater // also sickern wir nach oben elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Eine mögliche Optimierung wäre die Platzierung eines Sentinels mit minimalem Key an Stelle 0 im Index. Dann könnte auf die Abfrage !isRoot verzichtet werden. Allerdings gibt es ein solches Element nicht für jeden Typ T.
3.4 deleteMin
Jetzt fehlt nur noch die deleteMin-Methode. Hier wird eine Implementierung der zweiten Variante vorgestellt. Zur Erinnerung: Wir löschen das kleinste Element und füllen die Lücke, indem wir immer das kleinere Kind nach oben ziehen. Anschließend tauschen wir die Lücke mit dem letzten Element des Heaps und lassen es nach oben sickern.
template<typename T, size_t MAX_SIZE> void Heap::deleteMin() { size_t current = getRoot(); size_t child = getLeftChild(current); if(child <= size_) { do { // wenn child nicht das letzte Element (der Knoten also 2 Kinder hat) // wechsle zum rechten Kind, wenn es kleiner ist child += (!isLastElement(child) && compare(elements_[child+1], elements_[child])); elements_[current] = elements_[child]; current = child; child = getLeftChild(current); } while(child <= size_); } // die Lücke ist nun unten angekommen // tausche mit letztem Blatt und vermindere Größe um 1. T element = elements_[size_--]; // jetzt noch das Blatt wieder hochsickern lassen. size_t father = getFather(current); while(!isRoot(current) && compare(element, elements_[father])) { elements_[current] = elements_[father]; current = father; father = getFather(current); } elements_[current] = element; }Damit ist auch die letzte Funktion geschafft.
3.5 Details zur Implementierung
Das war's zunächst mal von der Implementierungsseite. Durch die Kapselung der father/child/isRoot etc.-Funktionen könnte man nun auch leicht die Platzverschwendung bei Element 0 loswerden. father(i) = i/2 bleibt, leftchild(i) = (i+1)*2-1 usw. Allerdings muss man auch in den Funktionen einige Vergleiche mit size_ ändern. Ob und wieviel langsamer es danach ist, müsste man mal nachmessen. Dazu habe ich aber gerade keine Lust. Außerdem stört mich der kleine Platzoverhead nicht. Wir hatten ja sogar festgestellt, dass man ihn als Sentinel nutzen könnte, indem man zum Beispiel bei einem Heap<unsigned int> eine 0 reinschreibt. Auch hier wäre eine Messung interessant, ob es die Performance steigert (laut meinen Messungen bringt es was). Ein heißer Kandidat für solche Messungen ist übrigens heap_sort, oder auch die Verwendung in einer Priority-Queue.
4 Heaps in der STL
Auch die STL bietet eine Implementierung der Datenstruktur Heap, und auch heap-sort ist vorhanden. Die Heaps aus der STL sind Max-Heaps, das heißt an der Wurzel steht das größte Element, nicht wie in unserer Implementierung das kleinste. Das ist natürlich nur eine Frage des Sortierkriteriums.
Im Header <algorithm> sind folgende Funktionen:
void make_heap(RandomAccessIterator beg, RandomAccessIterator end);Baut in der Range einen Heap, indem es die Elemente so umsortiert, dass an der Stelle beg das größte Element steht.
void push_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass die Range [beg, end-1) bereits ein Heap ist und fügt diesem das Element an der Stelle end-1 hinzu.
void pop_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass [big, end) ein Heap ist und nimmt das größte Element aus dem Heap heraus und legt es an der nun frei werdenden Stelle end-1 ab.
sort_heap(RandomAccessIterator beg, RandomAccessIterator end)Erwartet, dass [beg, end) ein Heap ist und wandelt diesen in eine sortierte Folge um. Danach ist die Sequenz kein Heap mehr!
Jede dieser Funktionen gibt es auch noch in einer weiteren Variante mit einem zusätzlichen Parameter, um das Sortierkriterium festzulegen. Das folgende Codestück zeigt, wie diese Funktionen verwendet werden. Dabei ist zu beachten, dass beim STL-Heap das größte Element Wurzel des Baums ist. Dies hat den Vorteil, dass nachdem alle Elemente aus dem Heap entfernt wurden, das Array direkt aufsteigend sortiert ist.
int data[10] = {11,5,14,12,3,4,9, 8, 20}; make_heap(data,data+9); // erstelle heap, der alle Elemente außer der 20 enhält cout << "groesstes Element: " << data[0] << "\n"; push_heap(data,data+10); // füge 20 hinzu cout << "Neues groesstes Element: " << data[0] << "\n"; cout << "Entferne alle Elemente aus dem Heap: "; for(size_t i=10; i>0;--i) { cout << data[0] << " "; pop_heap(data,data+i); } cout << "\nInhalt des Arrays am Ende: "; for(size_t i=0;i<10;++i) { cout << data[i] << " "; }5 Ausblick
In diesem Artikel wurde gezeigt, was ein binary Heap ist und wie man ihn implementiert. Es sind aber auch noch einige Dinge offen: Der hier vorgestellte Heap ist statisch. Wer ihn dynamisch wachsen lassen möchte, könnte als zugrundeliegende Datenstruktur einen std::vector benutzen. Interessant wäre es auch, das Array über einen Pointer zu adressieren und ähnlich wie die STL-Variante den Heap inplace in einem gegebenen Speicherbereich zu erzeugen. Diese Funktionalität könnte man über einen eigenen Konstruktor bereitstellen. Außerdem wäre es nett, wenn man die Vergleichsfunktion mit angeben könnte. Durch die Verwendug der compare-Funktion für alle Elemente-Vergleiche sollte das kein Problem sein.
Interessant für eine flexiblere Priority-Queue ist die Möglichkeit, Elemente auch wieder zu löschen oder ihren Key zu verändern (vor allem verkleinern). Da es keine Möglichkeit gibt, in einem Heap effizient zu suchen, müsste der Index des Knotens, der gelöscht werden soll, bekannt sein. Dann könnte man ihn einfach mit dem letzten Blatt vertauschen, sodass er gelöscht werden kann. Anschließend muss man den reingetauschten Knoten noch nach unten durchsickern lassen. Möglicherweise wäre es dann interessant, doch eine Funktion siftdown(i) zu implementieren, die das übernimmt. Der Code ist im Prinzip vorhanden. Es ist klar, dass diese Operation in O(log n) Zeit läuft. Damit lässt sich auch das Ändern eines Keys über remove/insert implementieren. Die Laufzeit ist ebenfalls O(log n) Zeit.
Es gibt noch weitere Heaps, man könnte zum Beispiel einen 4-ary Heap oder gar Bäume mit noch höherem Grad bauen. Da viele aktuelle Prozessorarchitekturen allerdings sehr wenig Register haben, wird das nicht viel effizienter als ein binary Heap. In Zukunft könnte das aber anders aussehen. Unterschiedliche Heap-Varianten bieten unterschiedliche Laufzeitgarantien. Für spezielle Anwendungen und wenn es auf Performance wirklich ankommt, lohnt sich also ein Blick auf http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29. Vielleicht wird es auch noch einen zweiten Teil dieses Artikels geben, in dem dann Pairing-Heaps und Fibonacci-Heaps vorgestellt werden.
6 Quellen
- http://de.wikipedia.org/wiki/Heap_%28Datenstruktur%29
- Algorithmen in C++, Robert Sedgewick, Addison-Wesley (1999)
- Vorlesungsfolien "Algorithm Engineering", Prof. Sanders, Uni KA(SS06)
- The C++ Standard Library, Nicolai M. Josuttis, Addison-Wesley (1999)
-
-predator-: Deine Anmerkungenn zu den stl-funktionen sind richtig. Ich habe die entsprechenden korrekturen vorgenommen.